

Within SHOW, a modular inclusive system architecture has been created that can efficiently integrate with existing Connected Automated Vehicles (CAV) fleet management and Public Transport (PT) backend systems of the 17 cities included in the SHOW project, for improving existing transit operations. The architecture supports integration with existing local operational services and in parallel the deployment of a set of advanced CCAV services for PT which will be implemented and demonstrated within SHOW.
The system architecture is a significant project cornerstone as it will lead the subsequent SHOW implementation work, the SHOW system integration work as well as the SHOW system evaluation.
The figure below depicts the attributes of and the interaction among the SHOW system actors in an integrated system: AV operators, PT operators, riders, other road users, public authorities, 3rd party data providers, 3rd party services providers, automakers and legislation.
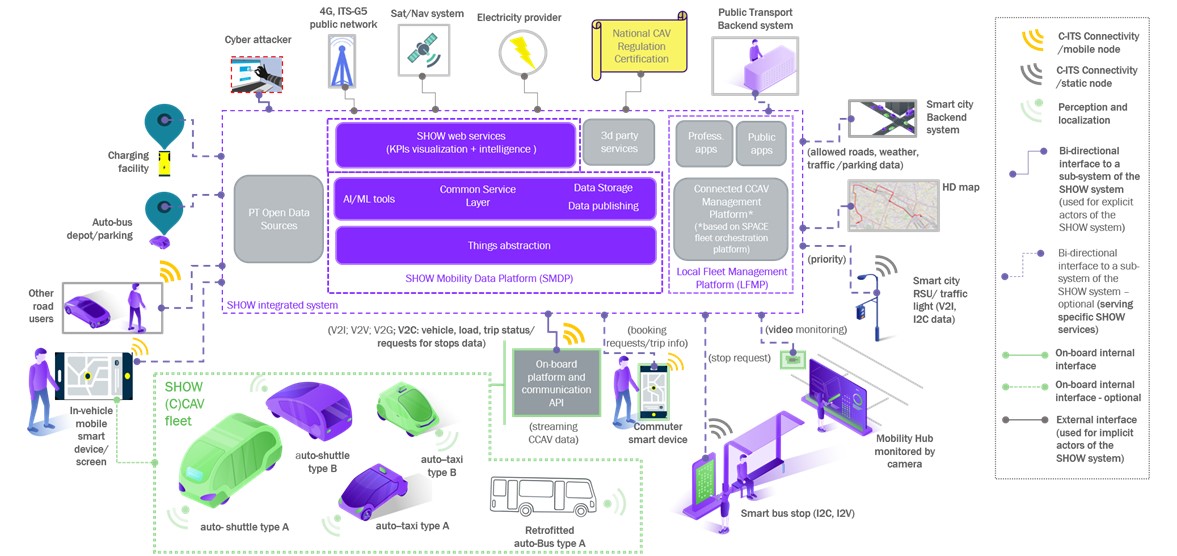
System conceptual view: SHOW actors and type of data exchanged among them and the SHOW integrated system high-level view (Source: SHOW)
The SHOW integrated system architecture is composed of four main layers structured in a bottom-up manner, namely:
- the physical layer including all the networked things,
- the cloud data ingestion called “things’ abstraction”
- the cloud data storage, enhancement, processing and publishing layer and
- the web-services layer that sits on top of the previous layer.
To address the core issue of fleet data accessibility and integration for a mixed-fleet service provider platform like in SHOW, three variations of integrated system architecture that pose different requirements of interoperability among its actors have been derived. Although each variation implements a different strategy of establishing a cloud access to the vehicle data (closed vs. open vs. mixed fleet data platform approach), at the end, all respect a common CCAM data model (i.e. SHOW project data and KPIs) that renders the SHOW data providers’ exposed datasets comparable and aggregatable. These architectures together with their merits and drawbacks are described in detail in the deliverable D4.1 “Open modular system architecture and tools – first version”
The main use of the proposed system architecture is to support:
→ the SHOW system integration work including the cloud-to-cloud communication between the Local Fleet Management Platform (LFMP) and the SHOW Mobility Data Platform (SMDP).
→ the ongoing SMDP and SHOW services implementation part of which is the SHOW reference Dashboard web-service implementation which holds the role of visualizing core operational aspects and the project’s KPIs.
Both tasks heavily rely on agreed communication APIs and data models, maximizing the use of open and standardized interfaces and assuring cyber security which remains a critical aspect for the CCAV integration success especially for PT where services are addressing a mass audience.
The work on the SHOW architecture will be continued and refined during the next two years of the project mainly focusing on the local implementations in the SHOW demonstration sites by:
- providing architecture deployment views based on a selected use case or service
- monitoring and supporting the implementation of communication protocols
- monitoring and supporting the implementation of cross-layers’ cybersecurity and interoperability mechanisms applied
- contributing to the SHOW data content and format specification work
- monitoring all technical risks stemming from the implementation of the integrated SHOW system in all SHOW demo sites.
For details about the SHOW system architecture, please read our deliverable D4.1 “Open modular system architecture and tools – first version”, available here.
Follow the progress of the SHOW system architecture with the next deliverable D4.3 “Open modular system architecture – second version” to be published in December 2021.
For more information about the SHOW system architecture please contact: Anastasia Bolovinou from ICCS, the Institute of Communication & Computer Systems, anastasia.bolovinou [at] iccs.gr.