

The core of the SHOW project is to investigate automated mobility through real-life demonstrations in cities across Europe. However, despite the variety of use cases, services and vehicles deployed on real roads in SHOW, we need to investigate how CCAVs will impact more broadly the mobility system among others if the number of CCAVs is increased and are deployed for a longer time frame.
Therefore, in addition to these real-world tests, simulations are carried out to underpin the real-world findings as well as to shed light on aspects that are difficult to test in the real world because of safety issues or scaling-up limitations. In this context, SHOW performs simulations aiming to:
- Testing the algorithms used in the CCAVs in advance on the computer
CCAVs make use of sophisticated processing algorithms for (1) sensing the environment like detecting pedestrians on the road, for (2) planning the trajectories for the next few seconds like evading objects on the road and for (3) implementing the actions like braking or steering. By using simulation, all these algorithms can be tested upfront in the computer before they are tested in a real CCAV on the road. The algorithm in the computer can be considered as the digital twin of the real algorithm because both behave in the same way.
Such tests can be performed much more efficiently, as there is no need for safety drivers, pedestrians, or other vehicles, and it is very easy to automate the simulation even for hundreds of kilometres.
- Pushing the limits for testing CCAVs in urban scenarios
In the real demo sites, many possibilities are limited by safety considerations, because passengers or other road users are at risk if vehicles brake or change their direction abruptly. In simulations higher speeds can be tested; something that is simply not possible in real sites due to the limited speed of vehicles as well as speed limits enforced by legislation to AVs. The same applies to driving in heavy traffic or in environments with many people, like shared spaces or bus terminals.
- Scaling-up results for impact assessment for better planning of CCAVs in the future
The results of the simulations will be made available for the impact assessment. This includes for instance simulations with a higher number of vehicles in order to derive the broader effects of CCAVs on a city with a larger geographical and/or temporal scale.
- Simulate network effects of pilot vehicles
With the use of simulation, it is possible to compute the (multimodal) impacts of introducing a new system on city level. In general, if only a few pilot vehicles are driving around, it is too limited to compute the impact on a larger scale. Simulation software can be used to answer questions such as “how many citizens would like to use the new service?”, “how many car trips will be replaced?” and “how many vehicles are required for obtaining a high service level in a city?”
To cover these different challenges, a differentiated approach is taken in SHOW. On the one hand, the simulations are divided into city level and street level. At street level, the focus is on automated vehicles themselves and on interaction with local vulnerable road users as shown in the Figure below.
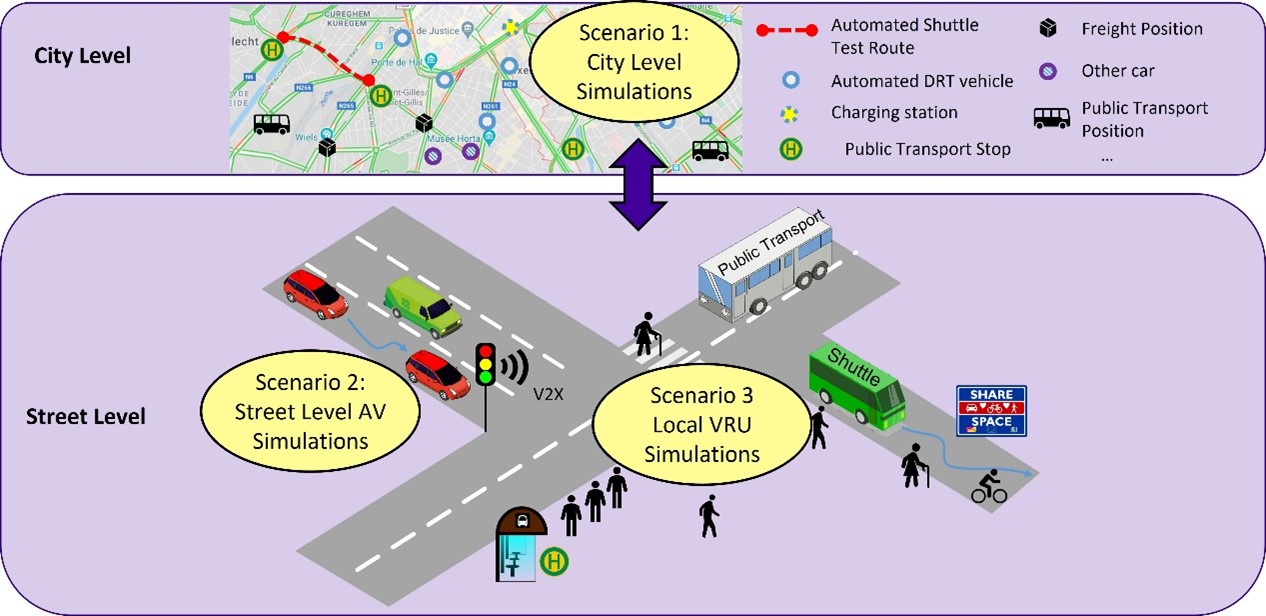
Breakdown of simulations in SHOW
The simulations are carried out for a representative selection of the SHOW pilot sites and make use of data from the real sites. The individual sites each pick out special features that are simulated as follows.
- Brainport: Street-level: Autonomous DRT vehicle; City-level: Extension to city area
- Graz: L4 vehicles and pedestrians in busy bus terminal
- Karlsruhe: L4 vehicles on fixed route
- Linköping: L4 vehicles on shared space and fixed route
- Madrid: L4 vehicles in circular route as well as bus depot
- Salzburg: City-level simulation
- Tampere: L4 vehicles with focus on safety validation
- Trikala: L4 vehicles on a fixed route
The special feature of the SHOW simulations is that the individual sites are initially simulated with the best expertise and tools of the individual partners. As a result, there are many different simulation tools, as can be seen in the next picture. The partners are currently working on using a uniform simulation suite to make the results of the individual sites and tools comparable and to reliably reach the objectives of SHOW.
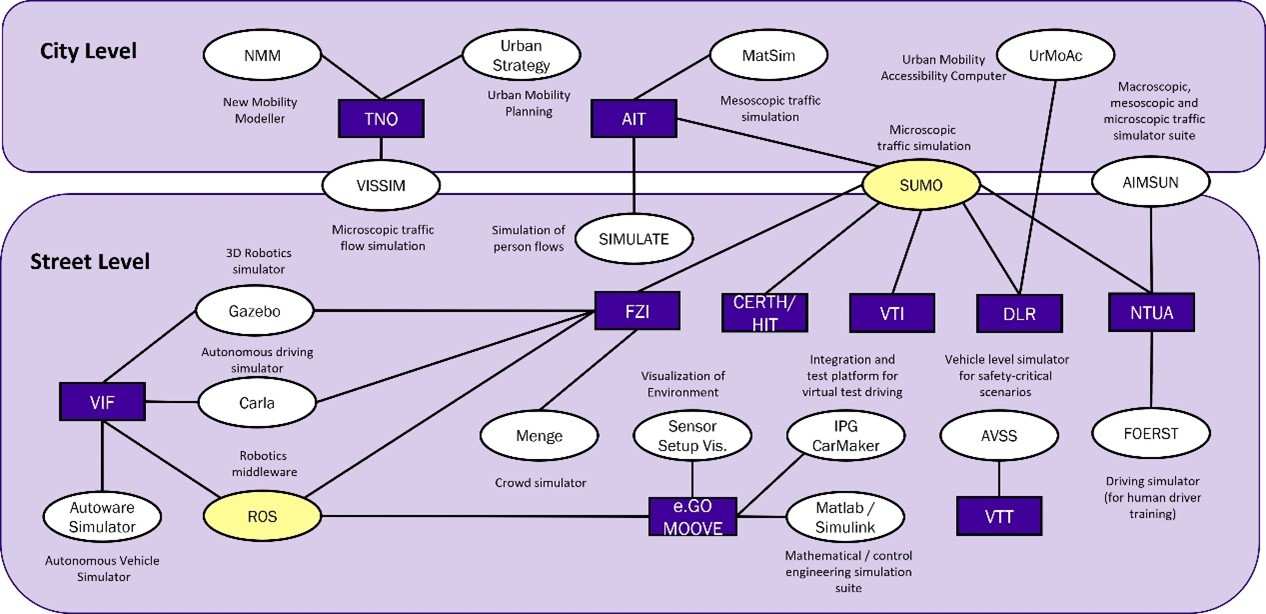
Overview of simulation tools used and related simulation partners
Information, such as the results of the simulations carried out, will be published at the SHOW website after completion. More information can be found in D10.1 “Simulation scenarios and tools” available here [Link].
You can also contact Joachim Hillebrand from Virtual Vehicle at joachim.hillebrand [at] v2c2.at.